В простых механизмов и устройств, которые облегчают ручную работу, но не являются самостоятельно действующими машинами, относятся роликовые конвейеры, домкраты, ручные лебедки.
Роликовые конвейеры применяются для перемещения по горизонтали или под небольшим углом наклона различных штучных грузов. По средству воздействия роликовые конвейеры разделяют на приводные и не приводные.
НЕ приводные роликовые конвейеры, как правило устанавливаются под углом наклона в направления движения, в этом случае рушуючою силой для грузов служит их сила тяготения.
Для горизонтальных роликовых, конвейеров силой перемещения груза является не непосредственно приложена к ним внешняя сила.
Роликовый конвейер состоит из ряда однотипных секций, которые представляют собой жесткую раму, которая опирается на стойки. Ролики крепятся к раме. Расстояние между роликами выбирают так, чтобы груз в любое время находился, как минимум на двух роликах. Ролики обычно изготовлены из стальной трубы, а при не тяжелых условиях работы - из синтетических материалов.
Для уменьшения личной массы конвейера время применяют дисковые роликовые опоры, которые представляют собой набор дисков. Опоры установлены на шарокопидшипниках, насаженных на подвижную ось. НЕ роликовые конвейеры допускают розвитлення или слияние со вторыми такими же конвейерами.
Для этого используют переходные секции. В местах перехо-листу устанавливаются специальные секции. Роликовые конвейеры могут быть стационарными и передвижными.
Для перемещения тяжелых грузов в горизонтальном положении или под небольшим углом наклона используются приводные роликовые конвейеры.
Лебедки - механизм, предназначенный для подъема груза, в котором тяговый орган называется барабан. их применяют как самостоятельный подъемный механизм или как составную часть сложных грузоподъемных устройств.
Лебедки бывают с ручным и электрическим приводом. В ручной лебедке барабан приводится в движение от рукоятки через две зубчатые передачи. Для предотвращения самопроизвольного опущения груза предусмотрено оборудование, состоящее из кранового колеса, жестко связанного с зубчатым колесом сцепления лебедки и собачки.
Вот собачки закреплена в шкив, который обхвачений тормозной лентой. Груз, затягивая силой тяготения ленту, создает тормозной момент, достаточный для содержание поднятого груза.
При подъеме груза собачка свободно движется по зубчиками храповика. Для опущения груза достаточно поднять рычаг, когда шкив получает возможность поворачиваться и груз начинает опускаться под действием личной силы тяготения.
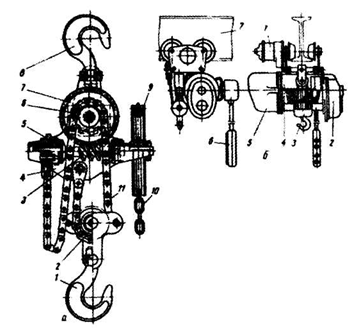
Тали представляют собой простые по устройству и небольшие по размеру грузоподъемные механизмы. В зависимости от привода тали делятся на ручные и электрические (См. Рис. 13.9).
В ручной тали в качестве тягового органа используется пластинчатые или сварные калиброванные цепи.
Применение цепей исключает необходимость в барабане и позволяет сделать механизм компактным и легким.
Наибольшее распространение получили ручные тали с червячным подъемным механизмом. Крюком таль прикрепляют к какой-либо конструкции, размещенной над грузом.
Его увлекают при помощи грузового крюка. Движение через цепь приводного блока передается ведущей звезде, которая при помощи грузового цепи поднимает или опускает крюковые обойму.
Для повышения коэффициента полезного действия, червячную передачу в деталях выполняют двохзахидним червяком. Поэтому для удержания поднятого груза в безопасности его опускают в червячного деталях, применяя копични или дисковые грузоподъемные тормоза.
В них для созидания тормозного момента используют осевое усилие червяка, создаваемое силой тяготения груза.